
Survey data can be used to increase the accuracy of camera solves, solve cameras that have zero parallax and solve different cameras in a matching scene layout. Survey data can be obtained by traditional surveying with a Total Station, scanning with LIDAR or shooting reference frames for photogrammetry.
Camera tracking software normally works by 2D tracking features in an image sequence. Using a photogrammetry algorithm it then estimates the 3D coordinates of these features. The camera is then solved based on the relationship of these coordinates. Using survey data is different. Instead of having the algorithm estimate the position of a 3D coordinate you simply tell the software where it is. If your survey data is accurate it will provide you with a better camera solve than estimation alone. Survey data and software estimation techniques can be combined.
Total Station
Survey data collected by a skilled surveyor with a Total Station is extremely accurate. However, this data is less convenient to correlate with production plates because it is a low density point cloud.
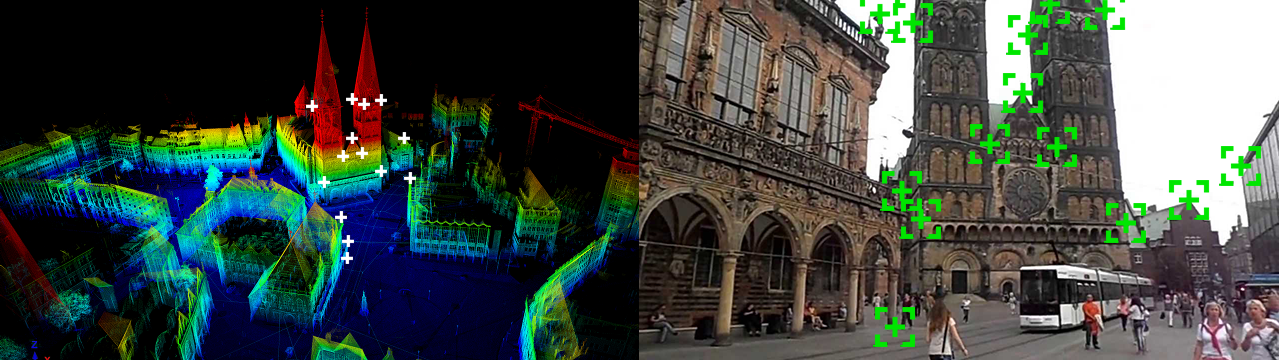
LIDAR
LIDAR scans provide excellent accuracy and a high density point cloud. In order to maximize usefulness in a visual effects pipeline the point cloud should be meshed.
Photogrammetry
Photogrammetry can be used to create a low or medium density point cloud of a set. This point cloud can be meshed. A large number of photographs are required and photogrammetry is generally less accurate than LIDAR or Total Stations.
Reference Frames
Reference frames are used to give the camera solving algorithm more parallax. Reference frames are photographs of the set taken from angles different from the plate camera. These photos must have overlapping coverage of the features being 2D tracked. They can include DSLR photos, videos and witness cameras. Reference images can also be taken of specific objects or props to assist in object tracking.